





Động cơ servo SG90 180 độ
Mã sản phẩm: (Đang cập nhật...)
Thương hiệu: cập nhật
Còn hàng
Liên hệ


Freeship đơn hàng từ 500k

Kiểm tra khi nhận hàng

Hỗ trợ khách hàng 24/7
- Thông tin sản phẩm
- Hướng dẫn
Động cơ servo SG90 có kích thước nhỏ, là loại được sử dụng nhiều nhất để làm các mô hình nhỏ hoặc các cơ cấu kéo không cần đến lực nặng.

Động cơ servo SG90 180 độ có tốc độ phản ứng nhanh, các bánh răng được làm bằng nhựa nên cần lưu ý khi nâng tải nặng vì có thể làm hư bánh răng, động cơ RC Servo 9G có tích hợp sẵn Driver điều khiển động cơ bên trong nên có thể dễ dàng điều khiển góc quay bằng phương pháp điều độ rộng xung PWM.
THÔNG SỐ KỸ THUẬT
- Điện áp hoạt động: 4.8-5VDC
- Tốc độ: 0.12 sec/ 60 deg (4.8VDC)
- Lực kéo: 1.6 Kg.cm
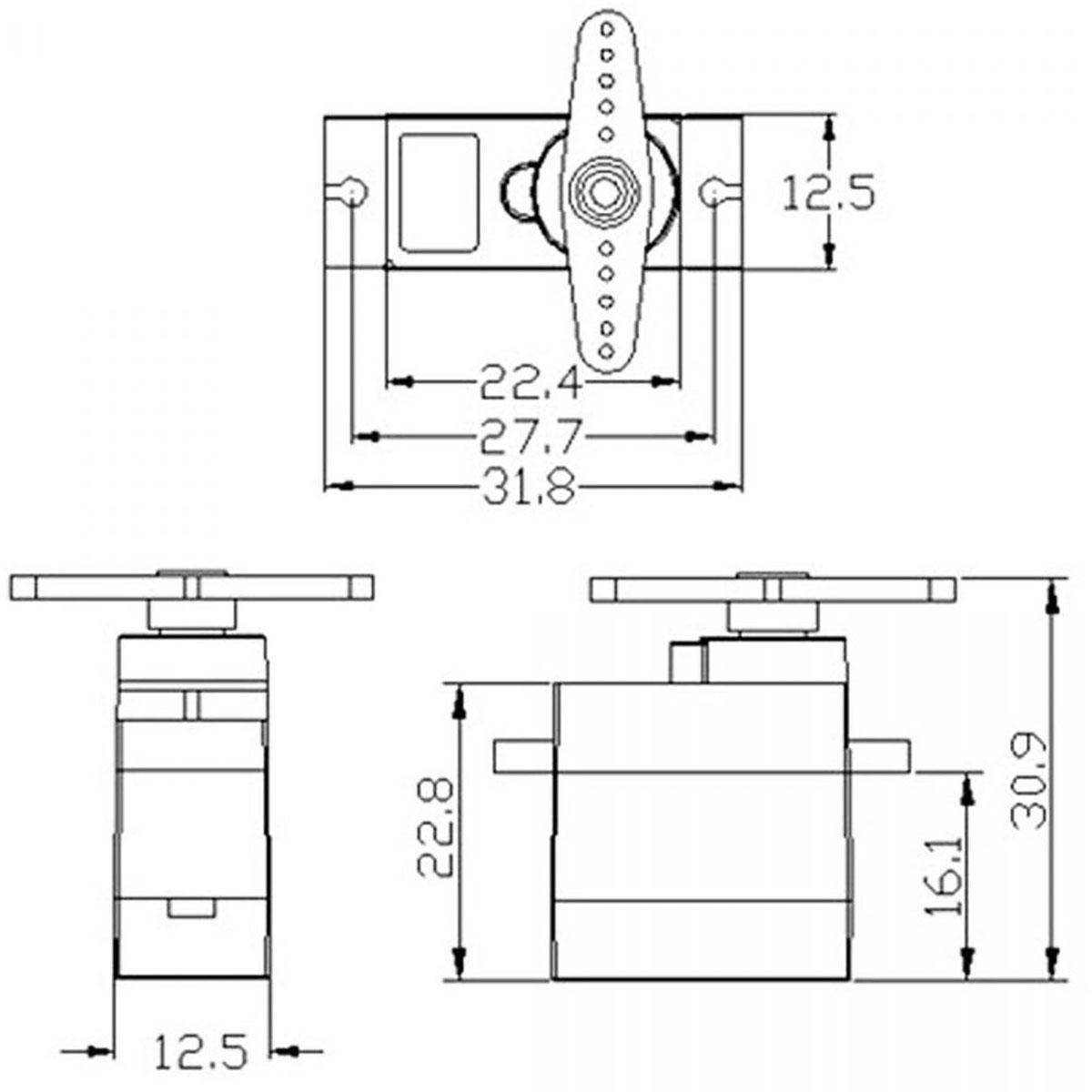
- Kích thước: 21x12x22mm
- Trọng lượng: 9g.
Phương pháp điều khiển PWM:
- Độ rộng xung 0.5ms ~ 2.5ms tương ứng 0-180 độ
- Tần số 50Hz, chu kỳ 20ms
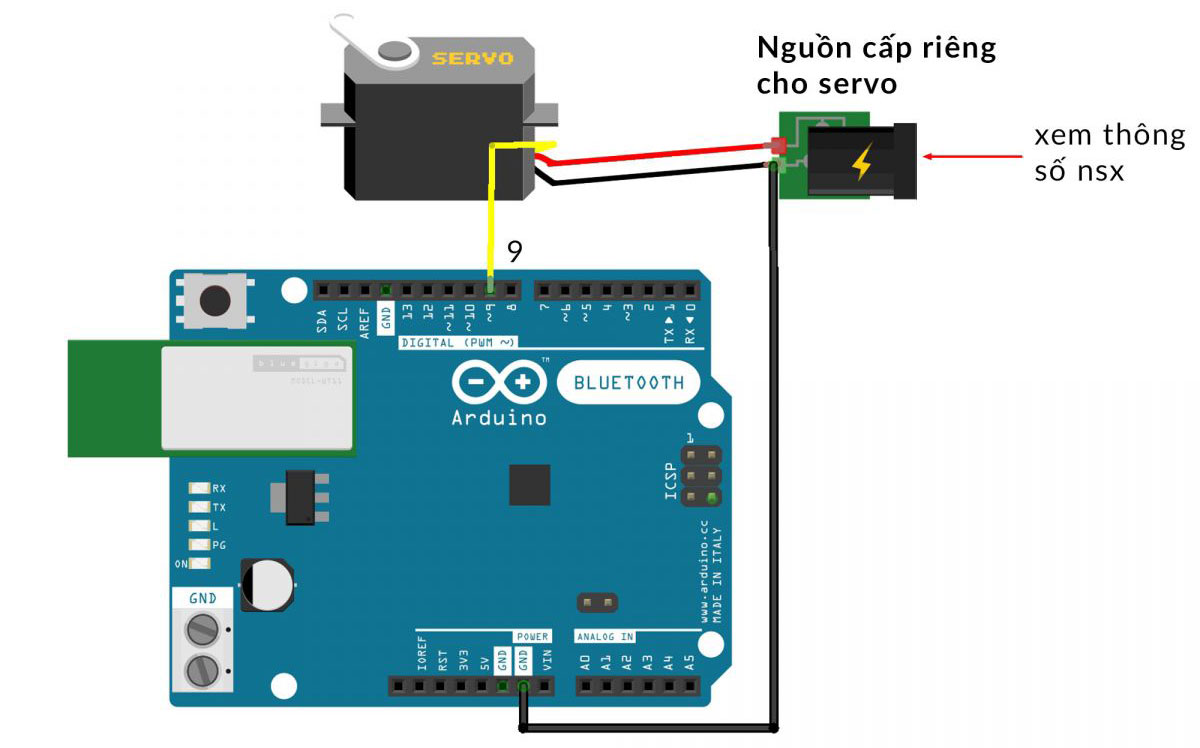
Sơ đồ dây:
- Đỏ: Dương nguồn
- Nâu: Âm nguồn
- Cam: Tín hiệu
Kích thước Động cơ servo SG90 180 độ
Kết nối với arduino:
Hình ảnh sản phẩm

Code test with arduino:
unsigned int Gia_tri_moi;
void setup()
{
TCCR1A = 0;
TCCR1B = 0;
// RESET lại 2 thanh ghi
DDRB |= (1 << PB1);
// Đầu ra PB1 là OUTPUT ( pin 9)
TCCR1A |= (1 << WGM11);
TCCR1B |= (1 << WGM12) | (1 << WGM13);
// chọn Fast PWM, chế độ chọn TOP_value tự do ICR1
TCCR1A |= (1 << COM1A1);
// So sánh thường( none-inverting)
TCCR1B |= (1 << CS11);
// P_clock=16mhz/8=2mhz
// mỗi P_clock bằng 1/2mhz= 0.5 us
OCR1A = 1060;
Gia_tri_moi = OCR1A;
// Value=1060 , tương đương xung có độ rộng 1060*0.5us=530us (0.53ms)
// Value=4820, tương đương xung có độ rộng 4820*0.5us=2410us (2,41ms)
ICR1 = 40000;
// xung răng cưa tràn sau 40000 P_clock, tương đương (20ms)
}
void set(unsigned int x)
{
if (Gia_tri_moi != x) {
OCR1A = x;
Gia_tri_moi = OCR1A;
}
else {
return; // thoát ngay
}
// x : 1060 - 4820
//Độ rộng: 0.53ms - 2.41 ms
}
void loop()
{
set(1060); // 0 độ
delay(1000);
set(4820); // 180 độ
delay(1000);
}
Xem thêm
Thu gọn
Xin mời nhập nội dung tại đây


